
Product details
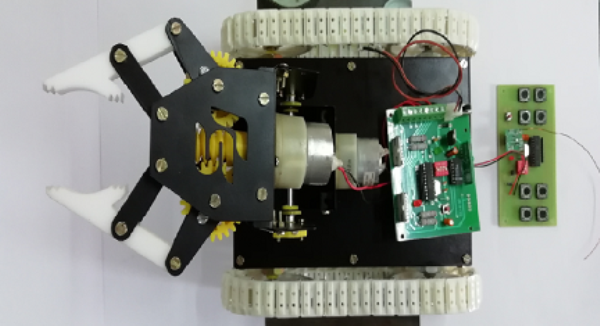
The project is designed to develop a pick n place robotic vehicle with a soft catching gripper. For example, it can safely handle a bomb very carefully to avoid explosion while catching. The robotic vehicle is RF controlled for remote operation.
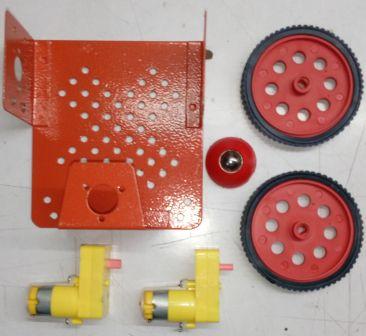
At the transmitting end using RF device, commands are sent to the receiver to control the movement of the robot either to move forward, backward and left or right etc. At the receiving end four motors are interfaced to the microcontroller where two for them are used for arm and gripper movement of the robot while the other two are for the body movement.
The RF transmitter acts as a remote control that has the advantage of adequate range, while the receiver end RF device is fed to the microcontroller to drive DC motors via motor driver IC for necessary work. Remote operation is achieved by RF circuit.
The main advantage of this robot is its soft catching arm that is designed to avoid extra pressure on the suspected object for safety reasons.
Further the project can be enhanced by interfacing it with a wireless camera so that the person controlling it can view operation of the arm and gripper remotely.
Microcontroller AT89c2051 is used in transmitter and receiver.
High current motor driver IC L298N used in receiver.
Long range 433 MHz RF module is used for RF transmitter and receiver.